





AGV Knowledge Series: Part 1 – Basics and Types
How did the evolution of "driverless" vehicles start?
Back in 1954, Arthur "Mac" Barrett from Barrett Electronics Corporation introduced the pioneering AGV known as Guide-o-Matic. He termed it a driverless vehicle because it functioned autonomously. Initially, Guide-O-Matic functioned as a towing machine that navigated by following a signal from a ceiling wire, which was later replaced with one embedded in the floor. Its primary role was to haul trailers within a warehouse setting.
Arthur Barrett was dedicated to researching diverse automation methods for tasks like door operation, material movement, and creating labor-saving devices. His radio-controlled industrial vehicles, named Radox, provided operators the ability to program it for picking up pallets, towing vehicles, or aligning a pallet truck.
Barrett's innovations motivated engineers and designers to advance contemporary AGV systems incorporating cameras, lasers, electrically conductive tape, among other technologies, to navigate automated vehicles across diverse environments. The invention of automatic guided vehicles has transformed the transportation of both raw and finished materials.
1.Basic Knowledge of AGV
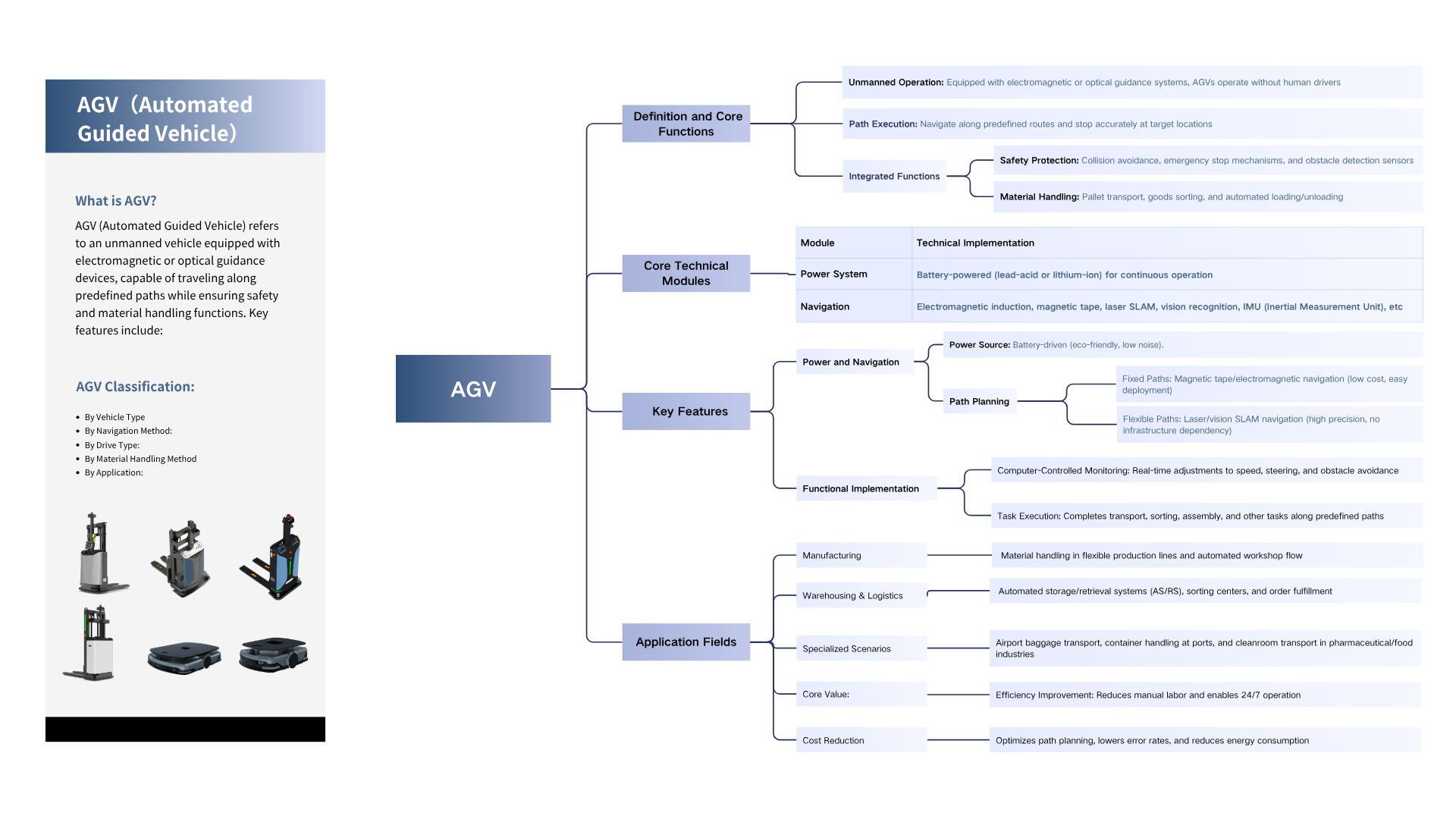
2. Classification of AGVs
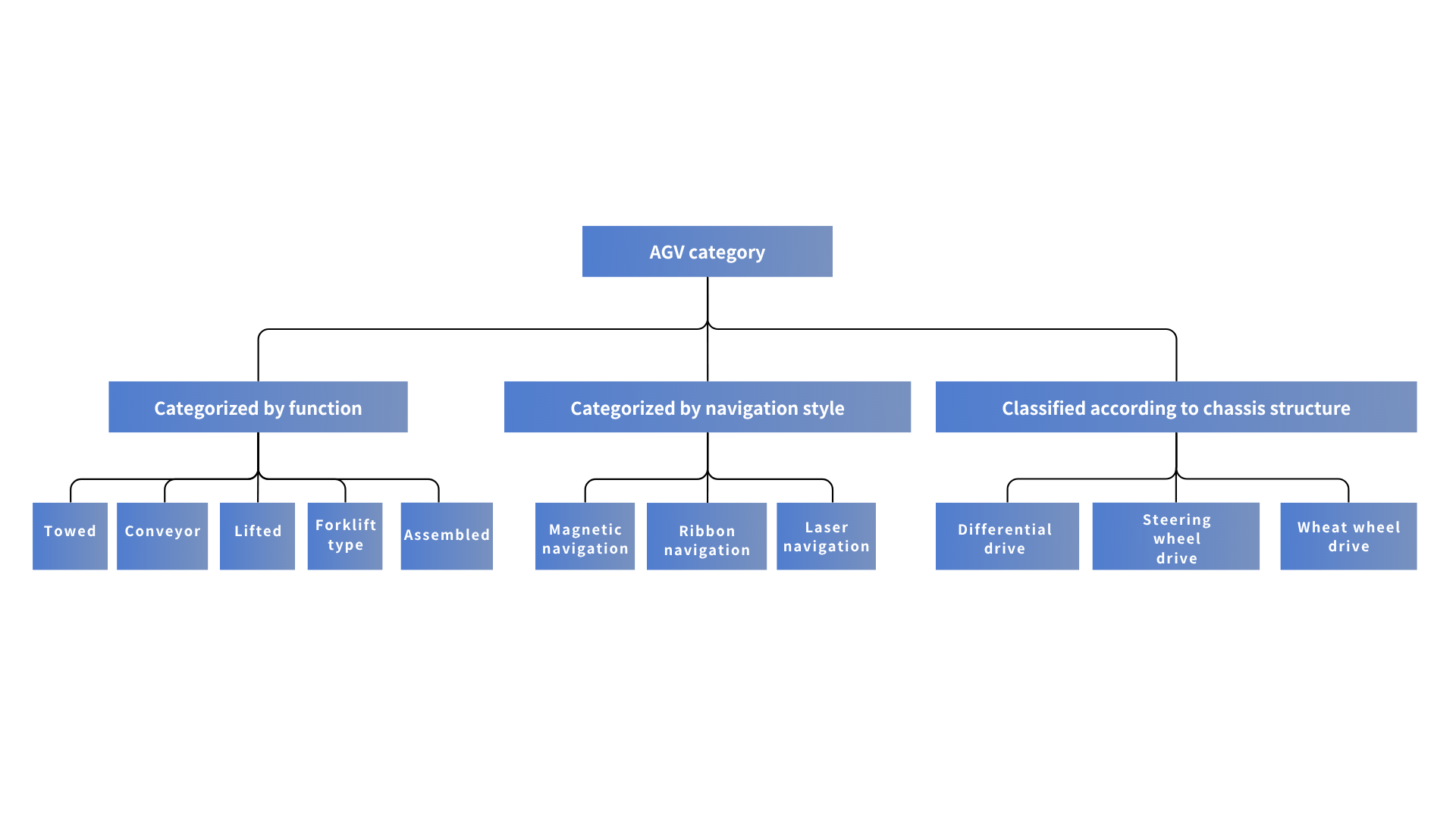
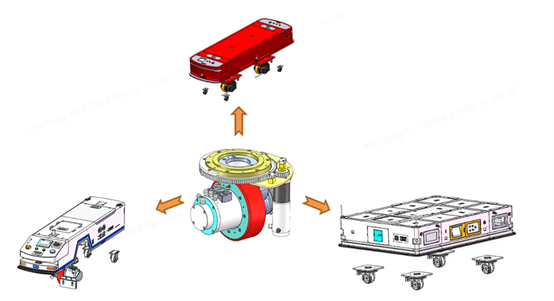
2.1Categorized by function
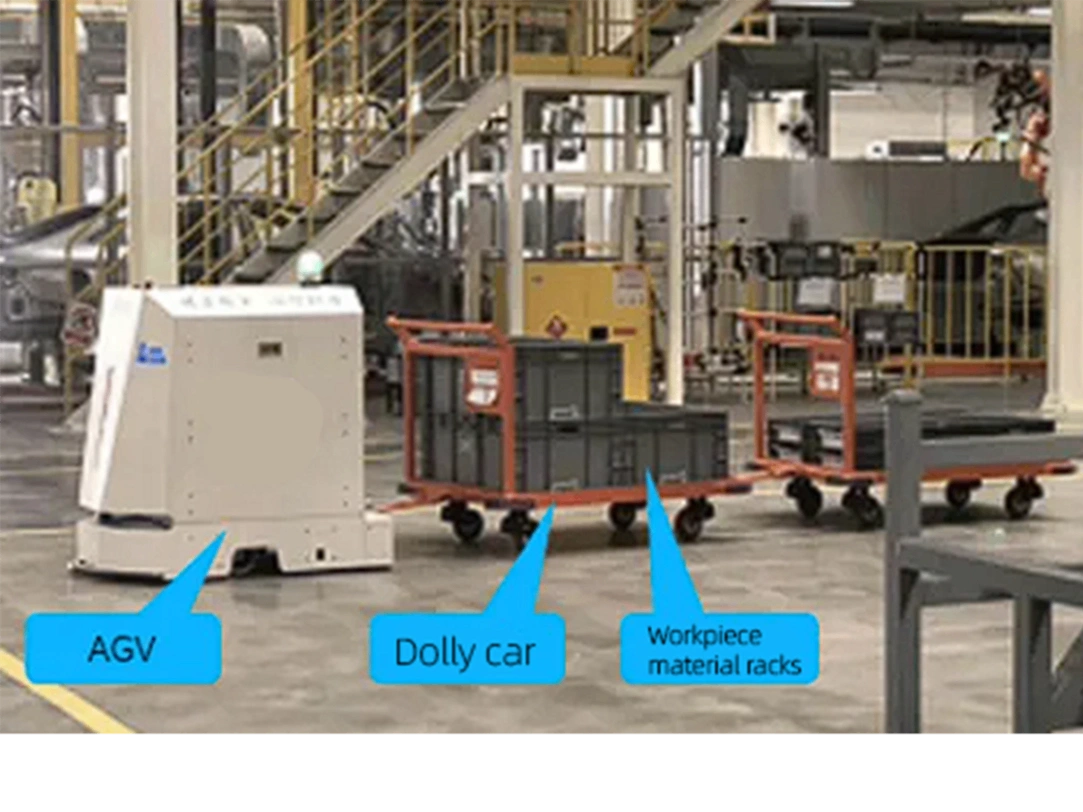
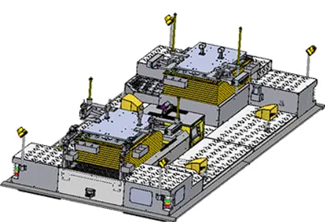
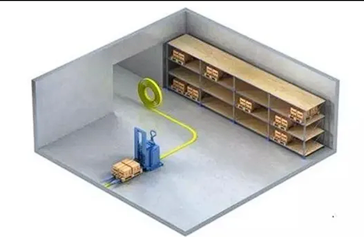
2.1.1 Towed
![]()
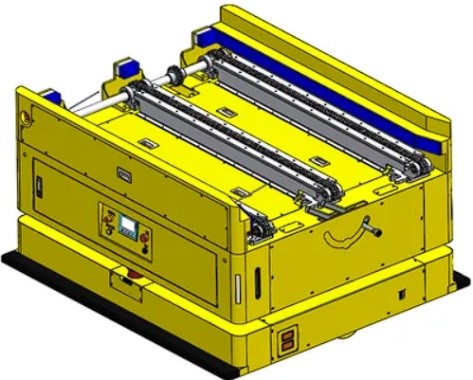
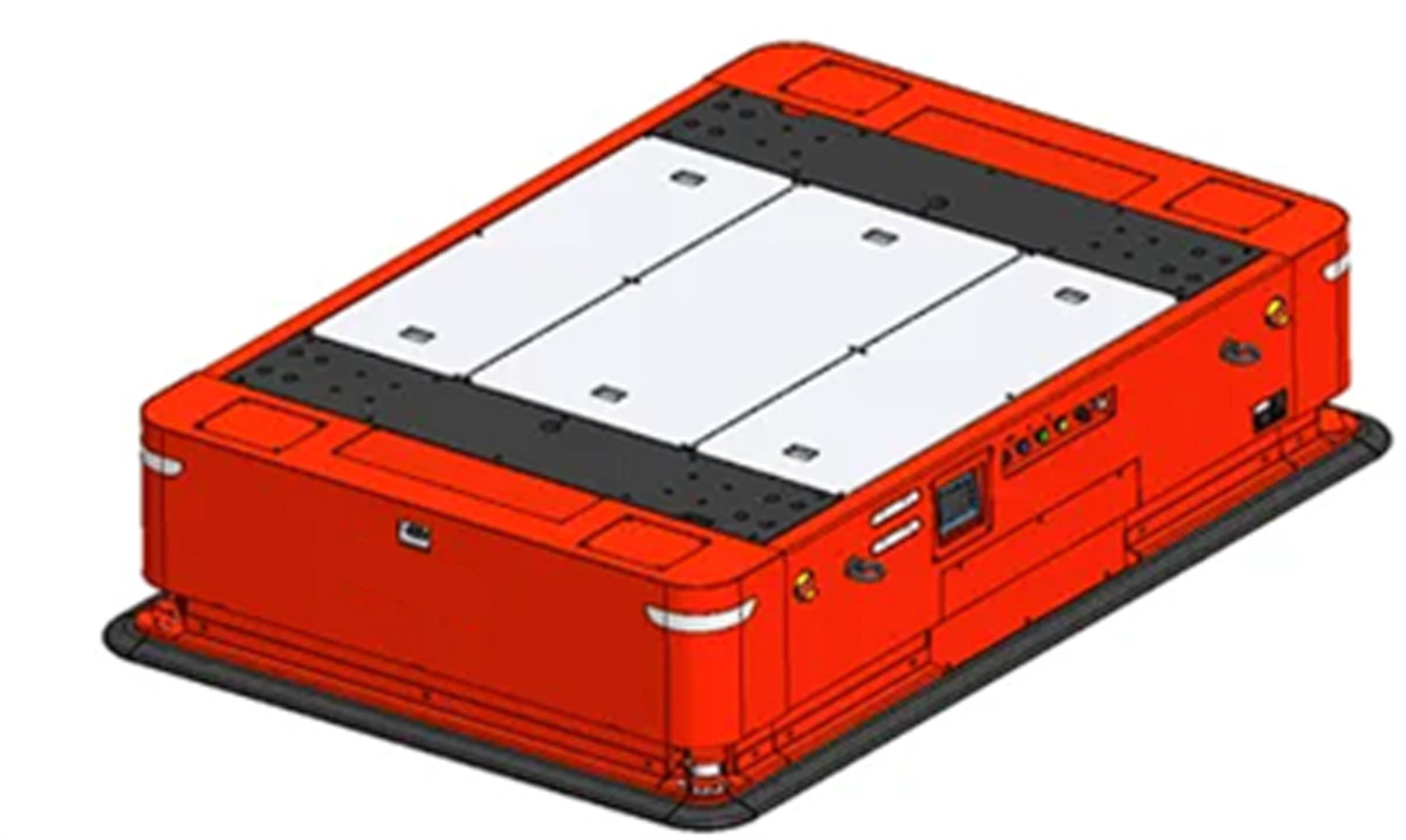
2.1.2 Conveyor

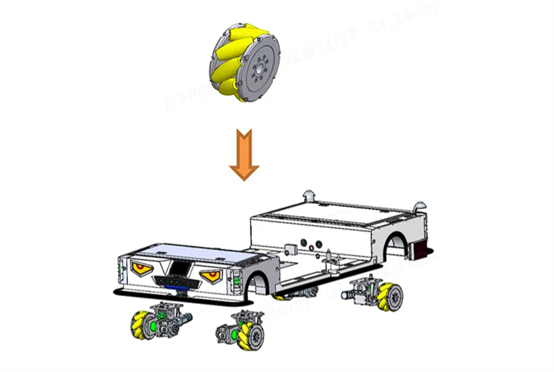
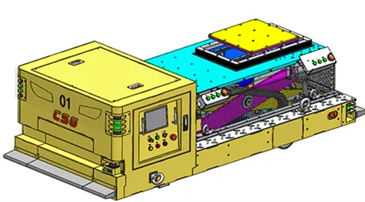
2.1.3 Lifted

2.1.4 Forklifttype


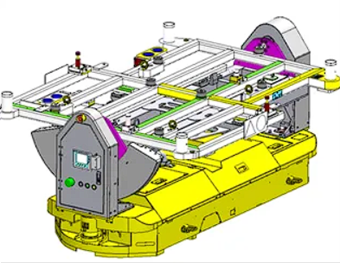
2.1.5 Assembled
2.2 Categorized by navigation style
2.2.1 Magneticnavigation
Magnetic stripe navigation lays
A tape on the form path of an automatic guided vehicle, and realizes the navigation mode through the identification of the magnetic field signal by the vehicle-mounted magnetic navigation sensor. The main advantages of magnetic stripe navigation are that the technology is mature and reliable, the cost is low, the laying of the tape is relatively easy, the expansion and change of the path is relatively easy compared to electromagnetic navigation, the running line is obvious, and there is no interference for sound and light. The disadvantages are that the path is exposed, it is susceptible to mechanical damage and pollution, it requires regular maintenance by personnel, and it issusceptible to the influence of ferromagnetic substances such as metals.
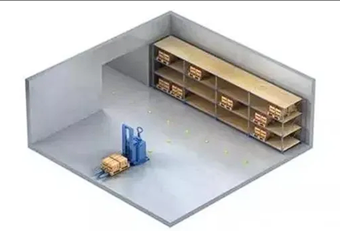
Magnetic nail navigation
The difference between magnetic nail navigation and magnetic stripe navigation is that the magnetic stripe is continuously laid, and the magnetic nail is discretely laid. If you need to navigate completely with magnetic nails, you will need to lay a large number of magnetic nails. The advantages of magnetic nail navigation are low cost and mature technology; Good concealment, more beautiful than tape navigation; Strong anti-interference, damage resistance, acid and alkali resistance. The disadvantage of magnetic nail navigation is that the AGV path is susceptible to the influence of ferromagnetic substances, the amount of construction to change the path is large, and the construction of magnetic nails will have a certain impact on the ground, and magnetic nail navigation is more widely used in the terminal AGV.
Magnetic nail navigation is suitable for use in combination with laser navigation, using laser navigation on the AGV driving path, and installing magnetic nails on the docking position with high accuracy requirements for precise positioning.
2.2.2 Ribbonnavigation
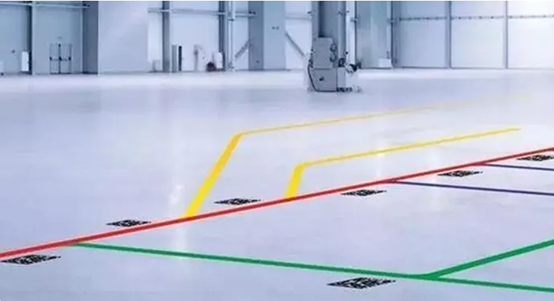
Ribbon navigation is a method of setting optical signs (pasting ribbons or painting) on the form path of an automated guided vehicle and realizing navigation by acquiring image signals from the vehicle's optical sensor. Optical navigation is similar to tape navigation, the main advantages are that the road surface is easier to pave, the expansion and change of the path is easier than tape navigation, and the cost is low. The disadvantage is that the ribbon is more susceptible to pollution and destruction, the requirements for the environment are high, the reliability of navigation is subject to ground conditions, and the stopping positioning accuracy is low.
Ribbon navigation is suitable for occasions with clean working environment, good ground flatness, and low requirements for AGV positioning accuracy
2.2.3 Lasernavigation
There are two modes of laser navigation: one is anti-laser navigation, and a laser emitting plate with a precise position is installed around the AGV driving path, and AGv determines its current position and direction by emitting a laser beam while collecting the laser beam reflected by the reflector, and realizes the guidance of AGv through continuous trigonometric geometric operations. The other is mirrorless laser navigation, which establishes a complete set of driving path maps of the car through laser ranging combined with SLAM algorithm, which does not require any auxiliary materials, has a higher degree of flexibility, and is suitable for global deployment.
The laser navigation method enables the AGV to flexibly plan the path, the positioning is accurate, the driving path is flexible and changeable, the construction is more convenient, and it can adapt to various practical environments. Since the reflector of laser navigation is in a high physical position, it is not easily damaged. The reflector cannot be covered during normal operation, otherwise its positioning will be affected. Due to the high cost, laser navigation has a very high occupancy rate in the current AGV market, but due to its superiority, it will gradually replace some traditional navigation and navigation methods.
2.3 Classified according to chassis structure
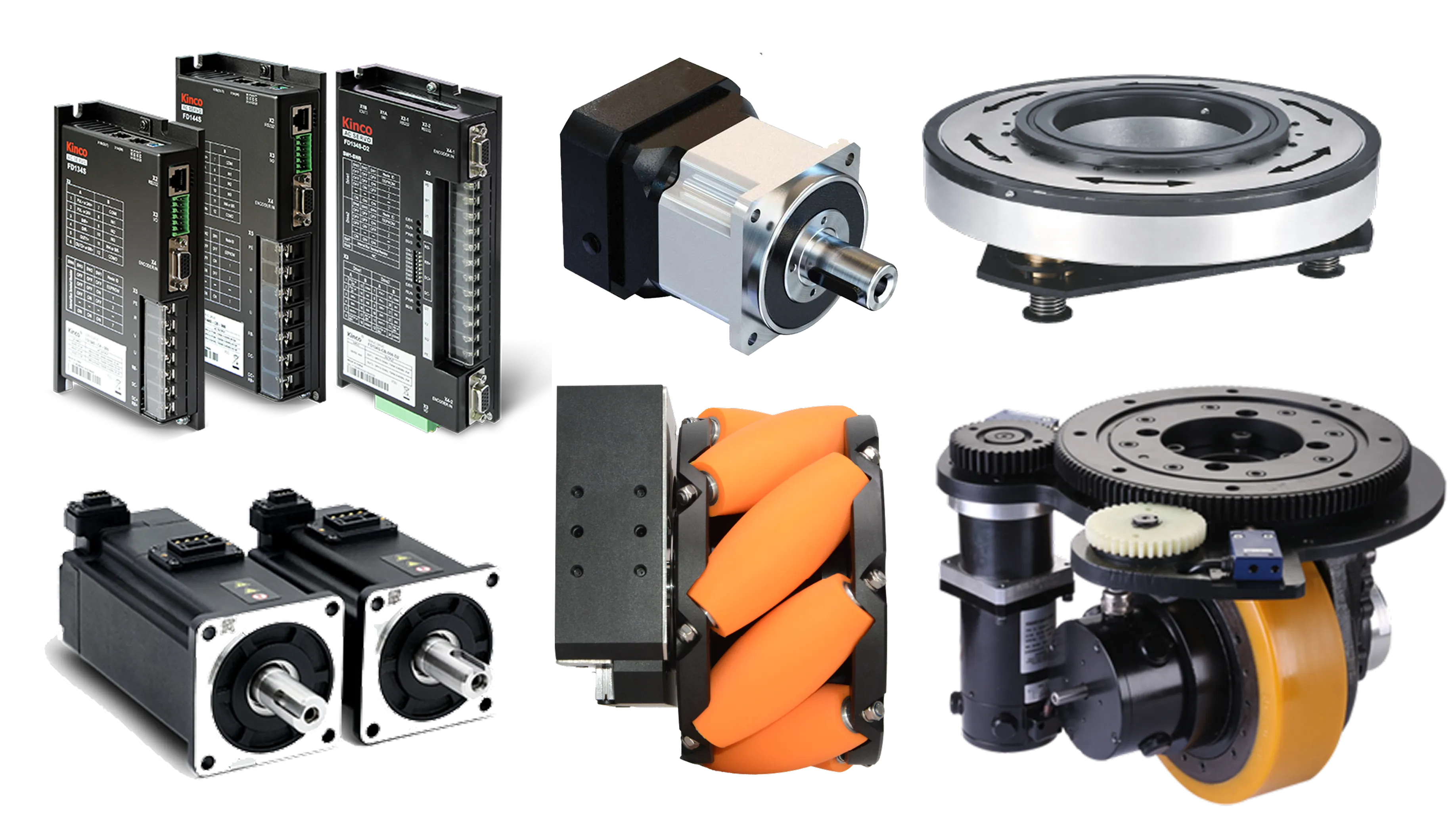
2.3.1 Differentialdrive
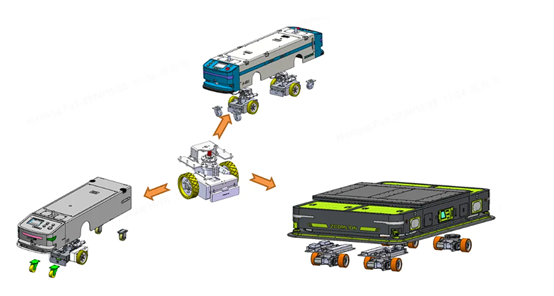
2.3.2 Steeringwheeldrive
2.3.2 Wheat wheeldrive