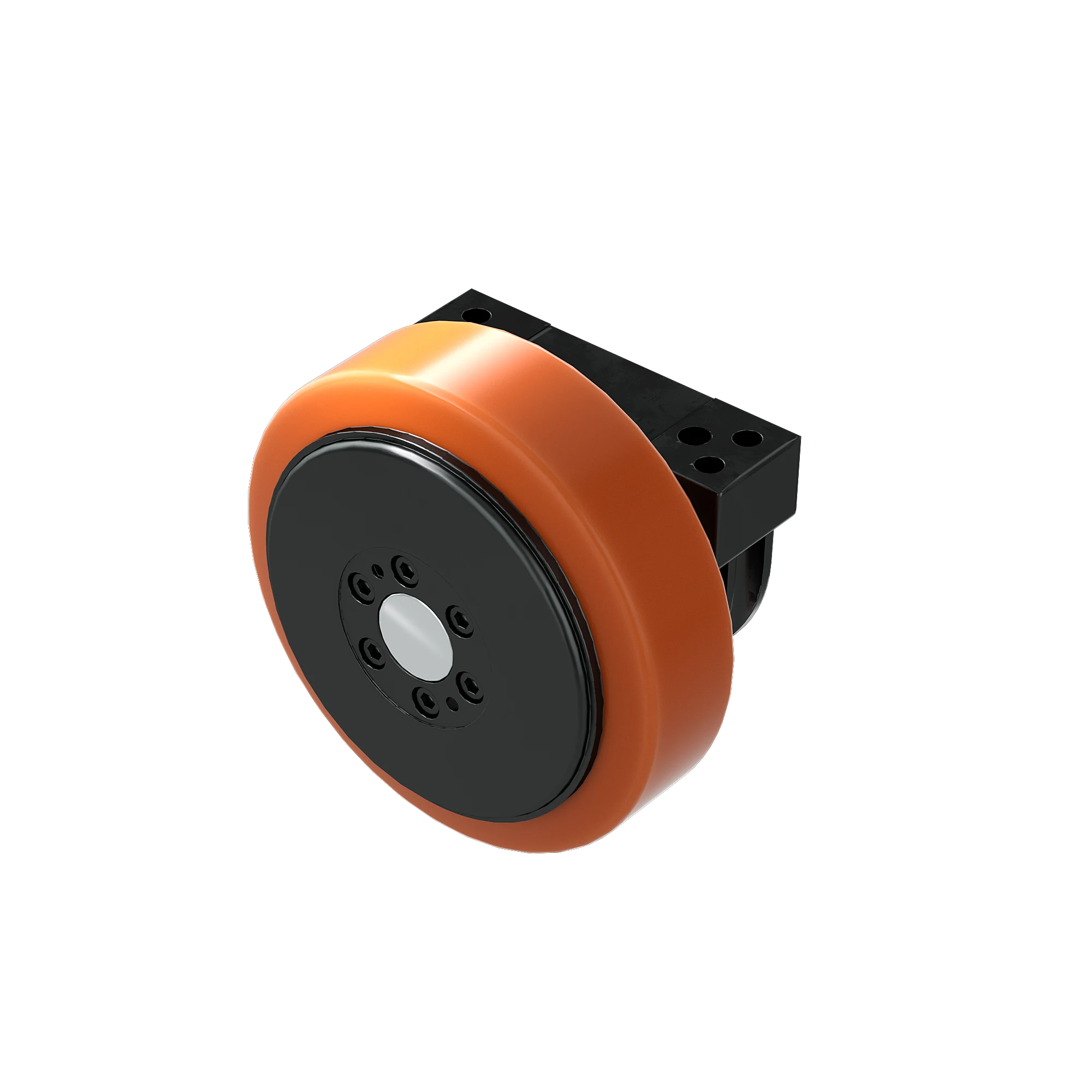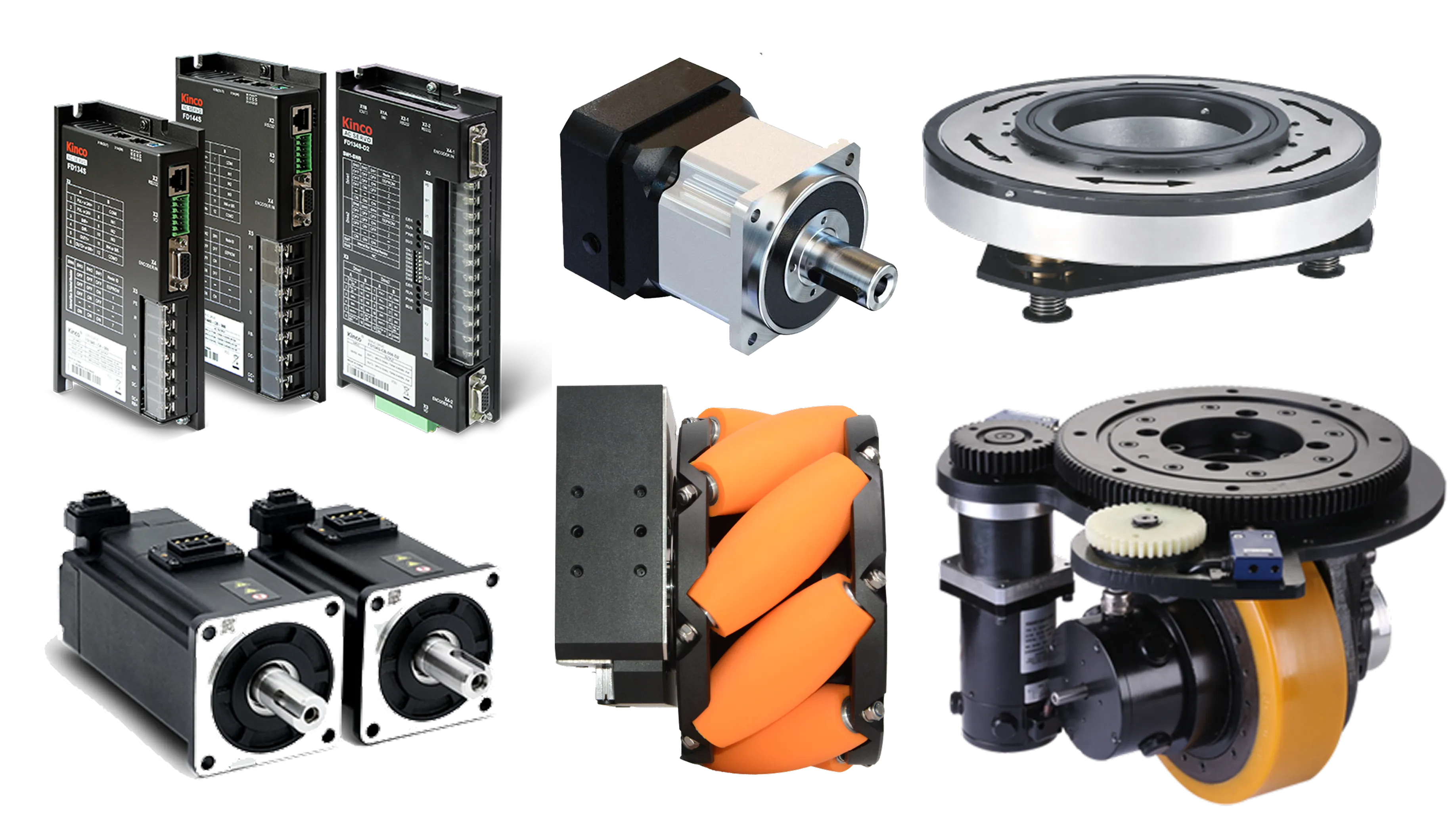





Integrated Motion Module
iWMC Integrated Servo Wheel Model


iWMC Integrated Servo Wheel Model
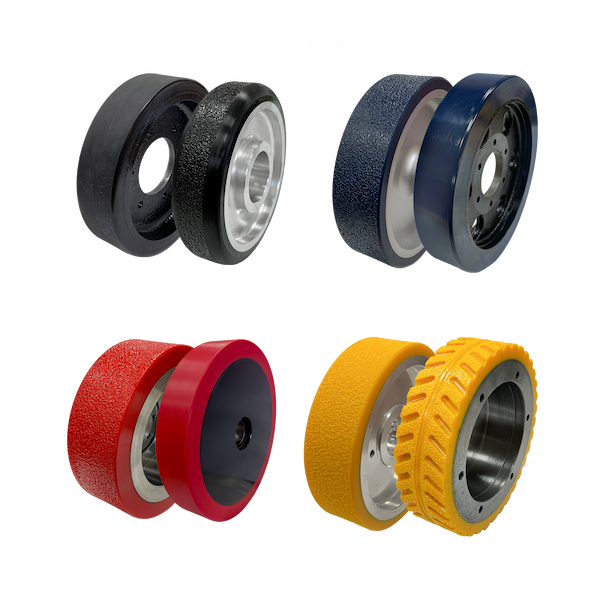
Tire Material
Nominal Torque
Power Range
Communication






.png)
.png)

.png)
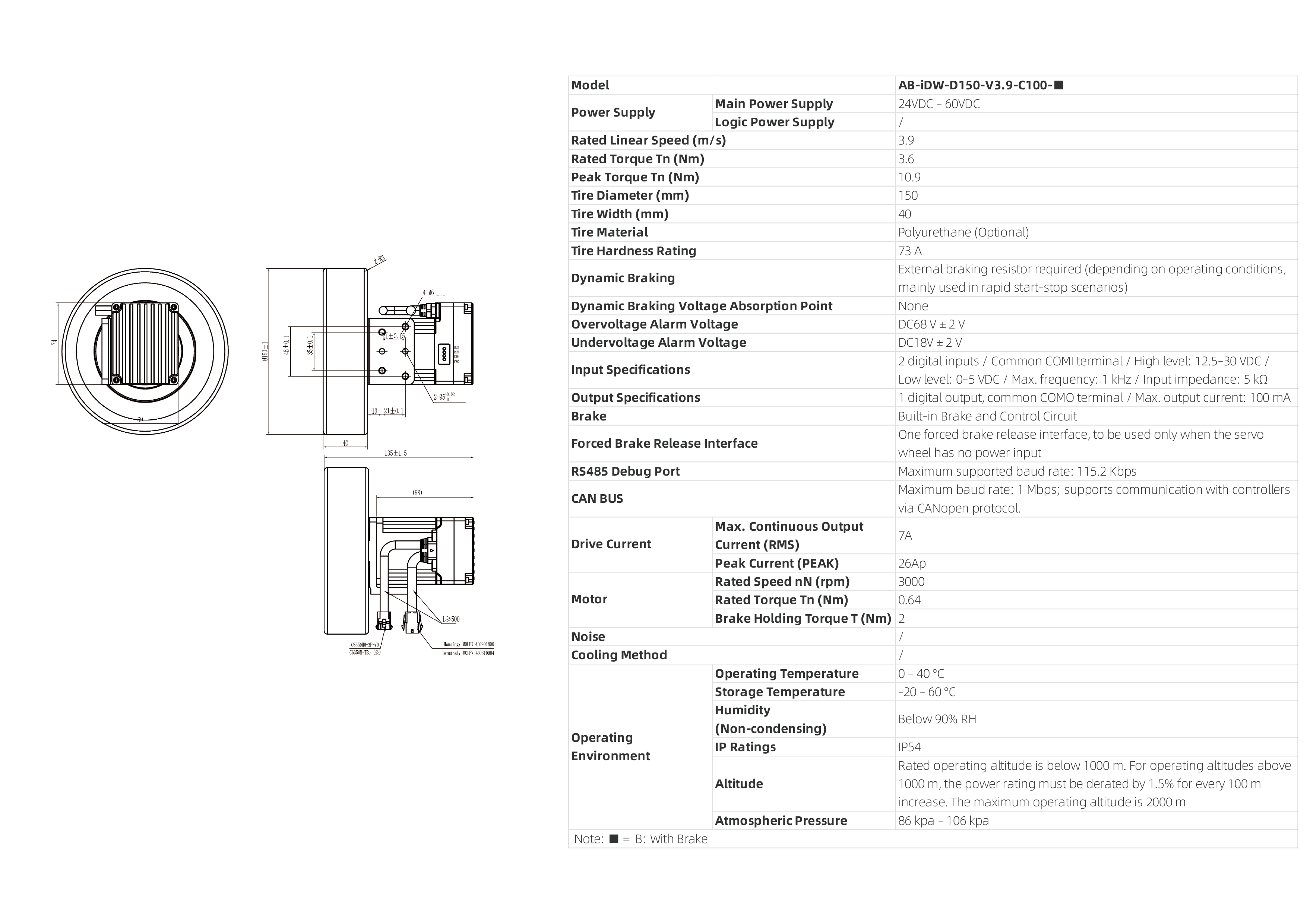
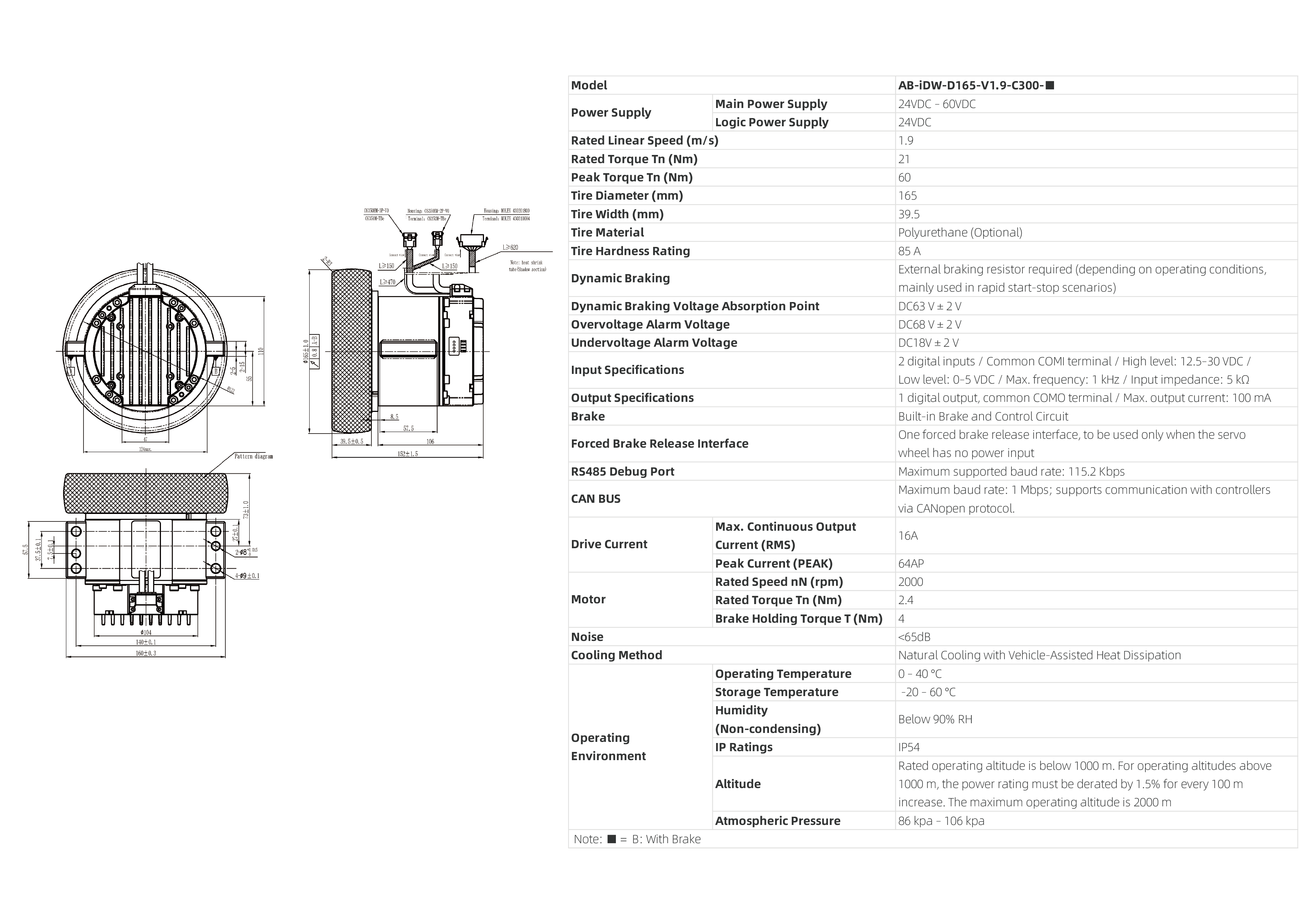
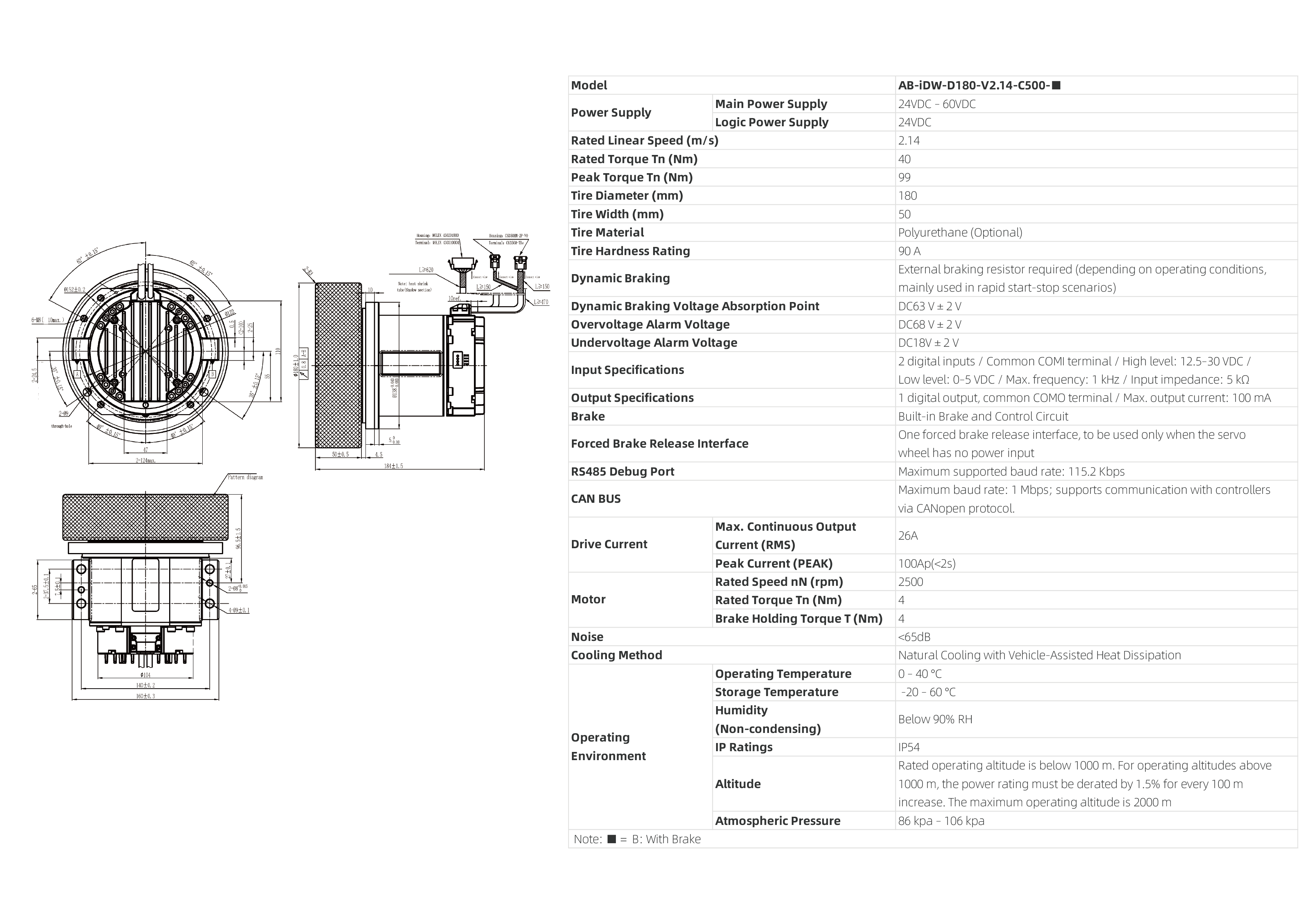
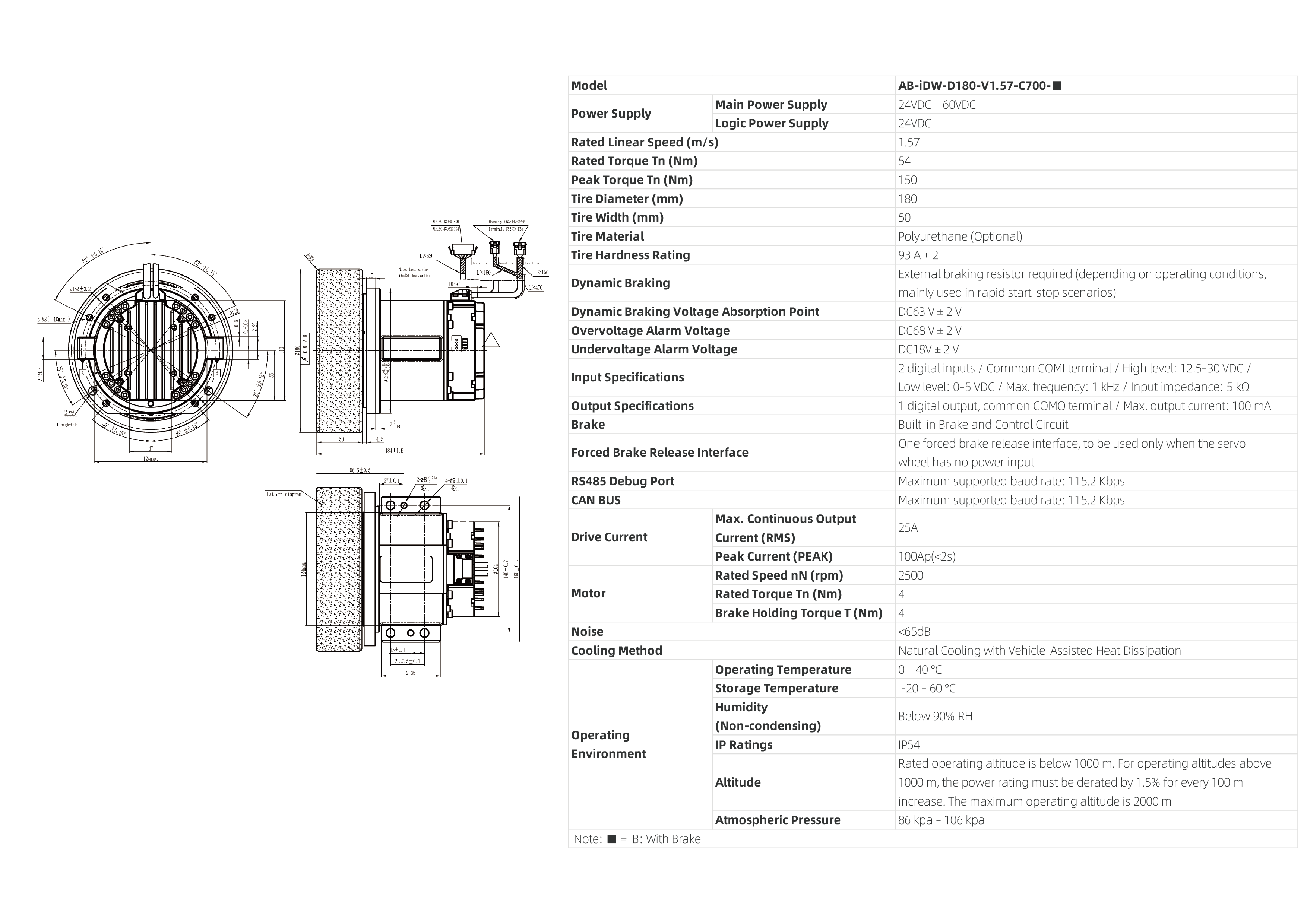
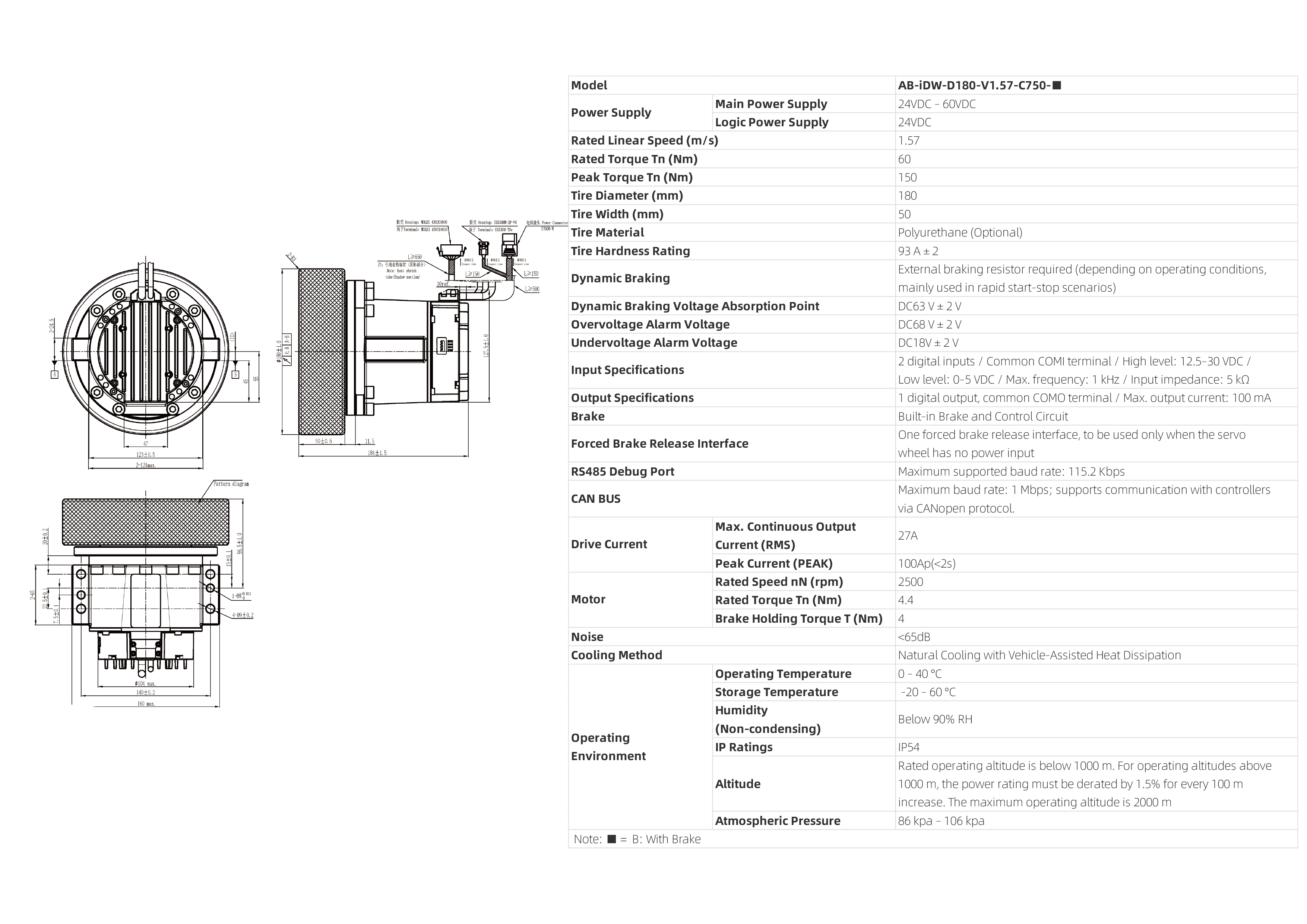
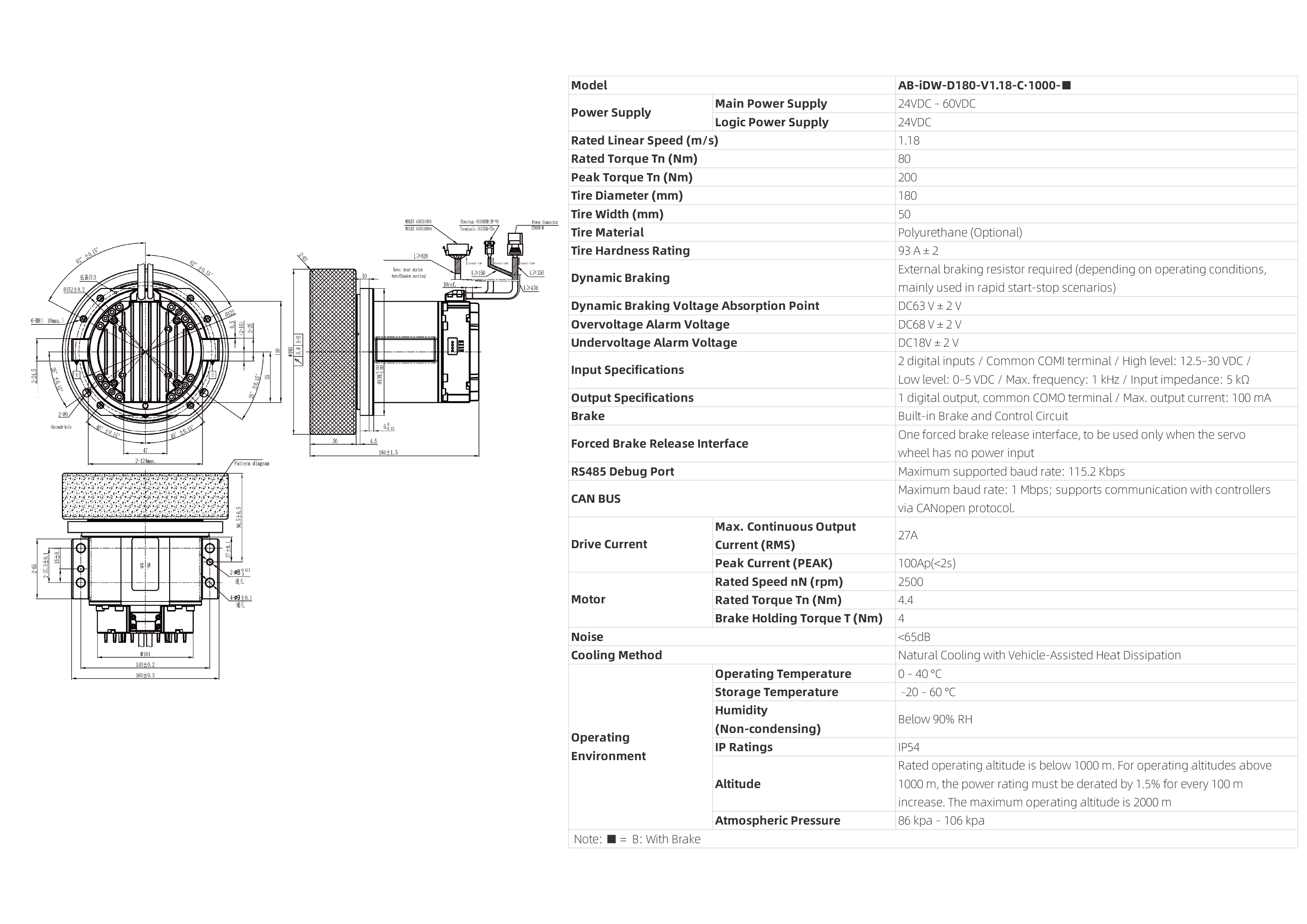
| Model | AB-iDW-D150-V3.9-C100-■ | AB-iDW-D165-V1.9-C300-■ | AB-iDW-D180-V2.14-C500-■ | AB-iDW-D180-V1.57-C700-■ | AB-iDW-D180-V1.57-C750-■ | AB-iDW-D180-V1.18-C·1000-■ | |
| Power Supply | Main Power Supply | 24VDC – 60VDC | |||||
| Logic Power Supply | / | 24VDC | |||||
| Rated Linear Speed (m/s) | 3.9 | 1.9 | 2.14 | 1.57 | 1.57 | 1.18 | |
| Rated Torque Tn (Nm) | 3.6 | 21 | 40 | 54 | 60 | 80 | |
| Peak Torque Tn (Nm) | 10.9 | 60 | 99 | 150 | 150 | 200 | |
| Tire Diameter (mm) | 150 | 165 | 180 | 180 | 180 | 180 | |
| Tire Width (mm) | 40 | 39.5 | 50 | 50 | 50 | 50 | |
| Tire Material | Polyurethane (Optional) | ||||||
| Tire Hardness Rating | 73 A | 85 A | 90 A | 93 A ± 2 | |||
| Dynamic Braking | External braking resistor required (depending on operating conditions, mainly used in rapid start-stop scenarios) | ||||||
| Dynamic Braking Voltage Absorption Point | None | DC63 V ± 2 V | |||||
| Overvoltage Alarm Voltage | DC68 V ± 2 V | ||||||
| Undervoltage Alarm Voltage | DC18V ± 2 V | ||||||
| Input Specifications | 2 digital inputs / Common COMI terminal / High level: 12.5–30 VDC / Low level: 0–5 VDC / Max. frequency: 1 kHz / Input impedance: 5 kΩ | ||||||
| Output Specifications | 1 digital output, common COMO terminal / Max. output current: 100 mA | ||||||
| Brake | Built-in Brake and Control Circuit | ||||||
| Forced Brake Release Interface | One forced brake release interface, to be used only when the servo wheel has no power input | ||||||
| RS485 Debug Port | Maximum supported baud rate: 115.2 Kbps | ||||||
| CAN BUS | Maximum baud rate: 1 Mbps; supports communication with controllers via CANopen protocol. | ||||||
| Drive Current | Max. Continuous Output Current (RMS) | 7A | 16A | 26A | 25A | 27A | 27A |
| Peak Current (PEAK) | 26Ap | 64AP | 100Ap(<2s) | 100Ap(<2s) | 100Ap(<2s) | 100Ap(<2s) | |
| Motor | Rated Speed nN (rpm) | 3000 | 2000 | 2500 | 2500 | 2500 | 2500 |
| Rated Torque Tn (Nm) | 0.64 | 2.4 | 4 | 4 | 4.4 | 4.4 | |
| Brake Holding Torque T (Nm) | 2 | 4 | 4 | 4 | 4 | 4 | |
| Noise | / | <65dB | |||||
| Cooling Method | / | Natural Cooling with Vehicle-Assisted Heat Dissipation | |||||
| Operating Environment | Operating Temperature | 0 – 40 °C | |||||
| Storage Temperature | -20 – 60 °C | ||||||
| Humidity (Non-condensing) | Below 90% RH | ||||||
| IP Ratings | IP54 | ||||||
| Altitude | Rated operating altitude is below 1000 m. For operating altitudes above 1000 m, the power rating must be derated by 1.5% for every 100 m increase. The maximum operating altitude is 2000 m | ||||||
| Atmospheric Pressure | 86 kpa – 106 kpa | ||||||
| Note: ■ = B: With Brake | |||||||


Discover the future of AGV technology with ATOMBOTIX